2-Dimensional Tilings and Curvature
Published:
In Euclidean geometry, if we want to tile the plane with regular polygons of the same size, we can ask which pairs $(p,q)$ are admissible where $p$ is the number of sides of the regular polygon and $q$ is the number of them that would share the same vertex. The sum of the interior angles of a polygon with $p$ sides is $(p-2)\pi$ and if it’s regular, then each angle is $(p-2)\pi/p$. On the other hand, if we have $q$ of them sharing a vertex, to get total coverage, we need $\dfrac{q(p-2)\pi}{p} = 2\pi$ which is equivalent to $q(p-2)=2p$. Rearranging and adding $4$ to both sides gives $pq -2q-2p+4=4$ which then lets us factor the left: $(p-2)(q-2)=4$. The only solutions where $p,q>0$ to this are $(3,6),(4,4),(6,3)$. We can ask the same question but for other 2D geometries such as spherical or hyperbolic geometry. On the sphere, the sum of angles of a triangle is greater than $\pi$ and so the relationship is $(p-2)(q-2)<4$ whereas on the Poincaré hyperbolic disk, it is $(p-2)(q-2)>4$.
Here is a graph showing the curve $(p-2)(q-2)=4$ whose integer points correspond to regular polygonal tilings of the Euclidean plane; marked in larger black dots.
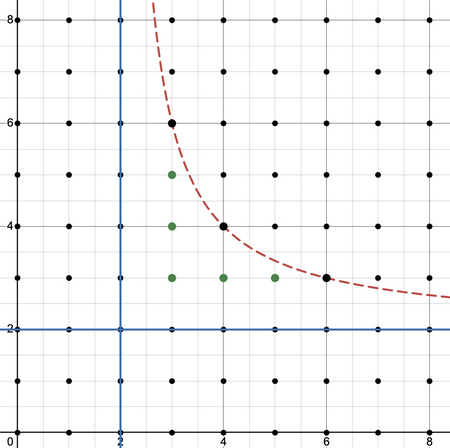
We also have spherical tilings which correspond to the regular polygonal tilings of the sphere; these are $(3,3), (4,3),(3,4),(3,5),(5,3)$ and also correspond to the Platonic solids: tetrahedron, hexahedron (cube), octahedron, icosahedron, dodecahedron. On the sphere, bigons are also possible since all geodesics intersect (the blue lines are $p=2$ and $q=2$). So we can have $(2,q)$ for any $q\geq 2$ though $q>2$ is more in the spirit of things. Lastly, we have infinitely many integer points for the hyperbolic portion.
Here are the spherical regular polygonal tilings.

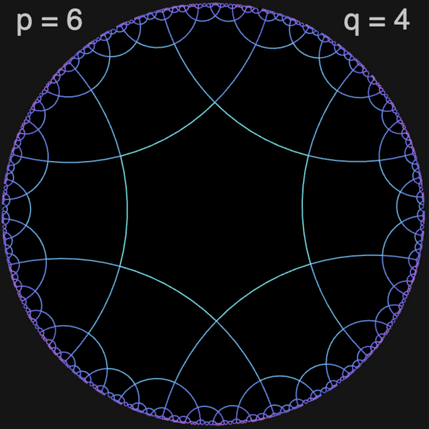
Here is an example of a hyperbolic tiling.
Interesting Geometric Facts
In Euclidean geometry, the geodesics (straight lines) are such that it’s possible they don’t intersect. That is, if we have a line and a point off of the line, there is exactly one line through the point that is parallel to the given line. But in spherical geometry, all geodesics intersect somewhere. And in hyperbolic geometry, there are infinitely many geodesics that can pass through a point without intersecting a given geodesic.
On a sphere of radius $r$, the area of a triangle depends on $r$ and the sum of angles in excess of $\pi$. That is, if the triangle has area $\alpha,\beta,\gamma$, then it’s area is $r^2(\alpha+\beta+\gamma - \pi)$. We often just pick $r=1$. Similarly, with the hyperbolic unit disk model, we normalize as well and the area of a triangle is now the deficit to $\pi$; i.e. the area is $\pi - (\alpha+\beta+\gamma)$. This is quite different from Euclidean geometry where the area of a triangle also depends on its side lengths. We can have two triangles with the exact same angles but of different areas. We call these similar triangles. But in the other two geometries, the sum of angles completely determine the area and so similarity implies congruence.
Curvature and Gauss-Bonnet
In 2-dim, sectional and Gaussian curvature coincide and we can define sectional curvature as follows. For $x \in (S,g)$ in a surface with a Riemannian metric, we can define a circle of radius $r$ in the tangent plane at $x$. The metric also defines the exponential map: pick a vector $v \in T_x S$ and look for the geodesic that emanates from $x$ with initial velocity $v$, and have it travel for time $1$. Anyways, the image of the circle under the exponential map will, when $r$ is sufficiently small, have an arc length of $2\pi r(1-(r^2/6)s(x) + O(r^3))$. If $s(x) \equiv 0$ like in Euclidean geometry, then up to 2nd order, the result is simply $2 \pi r$. With spherical geometry, $s(x) >0$ so the arclength is slightly smaller while in hyperbolic geometry, we have $s(x) \equiv -1$ so the arclength is actually slightly larger than $2\pi r$.
More specifically, say we take the unit sphere $S^2 \subset \mathbb{R}^3$ with the inherited round metric. Then when we apply the exponential map to a circle of radius $r$ in $T_x S^2$, the arclength of the image is $2 \pi |\sin(r)|$. One might think we should draw a line through $x$ and the center of $S^2$ inside of $\mathbb{R}^3$ and use that as the axis for projecting the circle onto the sphere. But this won’t work if the circle is of larger radius than the sphere. Instead, we should have a periodic function. A long vector $v \in T_x S^2$ should map to a geodesic that wraps around the sphere and since we’re dealing with great circles as the geodesics, the function should be periodic. In particular, when $|v| = r=n\pi$, where $n$ is a nonnegative integer, the image is either the single point $x$ or its antipode $-x$. It may seem weird to say that a circle of radius $2\pi$ has arclength 0 but the sphere is not like the Euclidean plane which can contain circles of arbitrary size. Note that the function is also not smooth at these points even though $\exp:T_x S^2 \to S^2$ is smooth. But the arclength introduces absolute values. With the Poincaré hyperbolic disk, the formula is $2 \pi \sinh(r)$ which grows quickly with $r>0$ since $\sinh(r ) = (e^{r} -e^{-r})/2$.
Of course, the sectional curvature $s(x)$ doesn’t have to be constant but for “general type” Riemann surfaces which in the closed case just means their genus is at least two, there is a unique hyperbolic metric in each conformal class of metric. That is, if $g$ is the metric on the Riemann surface, there is a function $u$ such that $e^{2u}g$ has constant sectional curvature $-1$. Multiplying by a positive function can flip the sign of the curvature. There is a general formula in all dimensions relating sectional curvature: $s_{new} = e^{-2u}(s_{old}-2(n-1) \Delta u - (n-1)(n-2)|du|^2_g$. Here, $\Delta u$ is the Laplacian as defined by $g$. So if $n=2$, then this simplifies to $s_{new} = e^{2u}(s_{old}-2\Delta u)$.
On the other hand, despite the sectional curvature not being constant, the Gauss-Bonnet theorem shows us that integrating the sectional curvature does result in a constant. The theorem is typically written with Gaussian curvature $K$ which is equivalent to $s(x)$ so that’s how we’ll present it.
Theorem (Gauss-Bonnet): Let $(M,g)$ be a compact 2-dim Riemannian manifold with boundary $\partial M$, possibly empty. Let $K$ be the Gaussian curvature of $M$ and $k_g$ the geodesic curvature of $\partial M$. Let $dA$ be the area form defined by $g$ and $ds$ the inherited length form on $\partial M$. Then $\int_M K\, dA + \int_{\partial M} k_g \, ds = 2\pi \chi(M)$ where $\chi(M)$ is the Euler characteristic; i.e. the alternating sum of its real Betti numbers. If $M$ is without boundary, then $\chi(M)=2-2g$ where $g$ is the genus of $M$.
Example: Take the northern hemisphere of a round sphere of radius $R$. The Euler characteristic is $\chi=1$, $K=1/R^2$, and $k_g = 0$ since the equator is a geodesic of the sphere. Then $M$ has area $4\pi R^2/2$ and so $\int_M K\, dA = 2\pi$ which agrees with what Gauss-Bonnet predicted.
But we can also flatten the northern hemisphere into a flat disk so that $K \equiv 0$ but now, $k_g = 1/R$ since the boundary is not a geodesic of a flat disk. The length of the boundary circle is $2\pi R$ so the integral $\int_{\partial M}k_g = 2\pi$.
Lastly, take a spherical octant such as the piece of the unit sphere in $\mathbb{R}^3$ where all the coordinates are nonnegative. The way to interpret the integral $\int_{\partial M}k_g$ is to integrate the smooth parts and add the sum of angles by which the smooth portions turn. So in this case, the smooth parts contribute nothing but there are three right angles so we get $3\pi/2$. The other integral $\int_M K \, dA = \dfrac{1}{R^2}{4\pi R^2}{8} = \dfrac{\pi}{2}$ so the final sum is still $2\pi$. Between these three examples, the topology never changed since each space is homeomorphic to the other two.