Single Variable Complex Analysis
Published:
Much of this note is based on John Milnor’s Dymamics in One Complex Variable. Let’s begin with reviewing some single variable complex analysis on $\mathbb{C}$. A map from $f:\mathbb{C} \to \mathbb{C}$ is complex differentiable if $f$ is a differentiable map when considered as a real map $f:\mathbb{R}^2 \to \mathbb{R}^2$ and moreover, its linearization at each point commutes with the action of multiplication by $i$ which, as a real map, can be written as the matrix $\begin{pmatrix} 0 & 1 \ -1 & 0 \end{pmatrix}$. From this, one derives the Caucy-Riemann equations. Another term used to describe such maps is holomorphic. One can also prove that when using the usual dot product of $\mathbb{R}^2$ to define lengths and angles, a holomorphic map $f$ is conformal whenever $f’(z) \neq 0$; i.e. it preserves angles. The proof is simply to show $\dfrac{\langle df_z(v),df_z(w) \rangle}{|df_z(v)||df_z(w)|}=\dfrac{\langle v,w \rangle}{|v||w|}=:\cos \theta$.
Now, let $D \subset \mathbb{C}$ denote the open unit disk and let $\widehat{\mathbb{C}} = \mathbb{C} \cup \infty$ denote the Riemann sphere which is topologically a sphere which we might think of as the one-point compactification of $\mathbb{C}$.
Schwarz Lemma: Let $f:(D,0) \to (D,0)$ be a holomorphic map such that $f(0)=0$. Then $|f(z)| \leq |z|$ and $|f’(0)| \leq 1$. Moreover, if we have equality at $z \neq 0$ for the first inequality or equality for the second inequality, then in fact $f(z) = cz$ where $|c|=1$; i.e. it is simply a rotation.
The main point of this lemma is that under the usual Euclidean norm, the distance between every $z \in D$ and 0 never increases and in fact, is usually distance decreasing unless the map is a rotation.
Proof: Since this is a holomorphic map, there is no pole, including at $z=0$. So the map $g(z) = f(z)/z$ is actually holomorphic (with target being $\mathbb{C}$) when you write out the Taylor series; has no pole. Put another way, we can extend $g$ to $z=0$ by setting it equal to $f’(0)$. Let $D_r$ be a closed disk centered at the origin with $r<1$. By the maximum principle, restricting $g$ to $D_r$ cannot have interior maximum so the maximum must be on the boundary, call it $M$. So $|g(z)| \leq |g(M)| =|f(M)|/r \leq 1/r$. As we let $r \to 1$, we see $|g(z)|\leq 1$ which shows $|f(z)|\leq |z|$. If we had equality, this means we have a maximum on the interior which means $g(z) = a$, a constant map and hence $f(z) = az$ for $|a|=1$. The above argument also shows then that $|f’(0)| \leq 1$. $\square$
Now, a Riemann surface $X$ is a topological space which is locally conformally homeomorphic to open subsets of $\mathbb{C}$ and hence, orientable. It is simply-connected if every continuous map $S^1 \to X$ can be continously deformed to a point. To Riemann surfaces are conformally equivalent if there exists a map between them which is conformal and has a conformal inverse. We now state a very important theorem:
Uniformization Theorem: There are only three simply connected Riemann surfaces, up to conformal equivalence:
- The Riemann sphere $\widehat{\mathbb{C}}$ (aka complex projective line)
- $\mathbb{C}$ (aka the complex affine line)
- $D$, the open disk (which inherits the complex structure of $\mathbb{C}$)
In how I named these three, it’s not altogether a trivial matter to see that $\widehat{\mathbb{C}} \cong \mathbb{CP}^1$ and I won’t really be using the algebraic geometry term as much. For $\mathbb{C}$, I will refer to it as a complex line.
For a geometric point of view, recall that for a 2-manifold $S$, scalar curvature is twice that of the Gaussian curvature $K:S \to \mathbb{R}$. The Riemann sphere admits a metric of positive scalar curvature, the complex line admits a flat metric, and the disk admits a metric of negative scalar curvature called the Poincaré metric which has constant Gaussian curvature $-1$. In fact, there’s more to this.
Theorem: Every Riemann surface $S$ is conformally isomorphic to a quotient $\tilde{S}/\Gamma$ where $\tilde{S}$ is one of these three Riemann surfaces. The quotient is by the action of a group $\Gamma \cong \pi_1(S)$ acting freely, properly discontinuously, by conformal automorphisms on $\tilde{S}$.
A Riemann surface can typically be described by the number of punctures $n$ that it has and the genus $g$. If $2g+n \geq 3$, then it is covered by the open disk $D$. The topology of Riemann surfaces covered by the complex line or open disk are rather simple in the sense that they have no nontrivial higher homotopy groups, only fundamental groups and the ones covered by the open disk have nonabelian fundamental groups while those covered by $\mathbb{C}$ have abelian fundamental groups.
For example, $\exp:\mathbb{C} \to \mathbb{C}^*$ is a covering for the annulus. We also have many lattices $\Lambda \cong \mathbb{Z}^2 \subset \mathbb{C}$ and these give rise to elliptic curves, many of which are not conformally equivalent. Similarly, if we want to create a closed Riemann surface from $D$, we can pick a $4g$-gon ($g \geq 2$) and find the action of a Fuchsian group to glue the proper edges together. The disk can be covered by this polygon and the result is a genus $g$ Riemann surface.
Brief aside: For closed Riemann surfaces $\Sigma$ of genus $g$ with marked points $n$ such that $2g +n \geq 3$ and a given almost complex manifold $(X,J)$, there is a moduli space of holomorphic maps $\Sigma \to X$ where the equivalence is defined by automorphisms of $\Sigma$ that send markings to markings. The context in which this first arose is in algebraic geometry, where Riemann surfaces are viewed as algebraic curves. The reason for the $2g+n \geq 3$ is to have stable curves; i.e. have finitely many automorphisms. For example, the Hurwitz bound says that the number of automorphisms on a stable curve of arithmetic genus $g \geq 2$ is at most $84(g-1)$. It is less when we impose markings. This moduli space and a natural compactification of that space called the Deligne-Mumford moduli space $\overline{\mathcal{M}}_{g,n}(X)$ which allows for nodal degenerations and bubbling. A special case is if $X$ is just a point. In that situation, there is a way to construct $\overline{\mathcal{M}}_{g,n}$ from an augmented Teichmüller space $\bar{T}_{g,n}(\Sigma)$. The interior of this space is homeomorphic to a ball but itself also has complex structure and complex dimension $3g-3+n$. The interior of this Teichmüller space is constructed from the set of complex structures on $\Sigma$ modulo diffeomorphisms which are holomorphic and isotopic to the identity map on $\Sigma$.
Back to our simply-connected Riemann surfaces, we’ve mentioned above the Poincaré metric $\rho$ on $D$. The definition is $\rho(x,y) = \tanh^{-1}\left|\dfrac{x-y}{1-\bar{x}y}\right|$ and it has constant Gaussian curvature $-1$ so it’s an example of a hyperbolic metric. The Schwarz lemma above was about holomorphic maps being distance decreasing for the usual Euclidean distance but in fact, they are distance decreasing for the Poincaré metric as well, a theorem of Pick. This is very interesting because we then see that a biholomorphism $f:D \to D$, having an inverse, leads us to conclude that $\rho(f(x),f(y)) = \rho(x,y)$; i.e. conformal equivalences (aka biholomorphisms) preserve the hyperbolic metric on $D$!
In fact, we can generalize even further, a result due to Alfohrs. Let $(S,\sigma)$ be a Riemann surface with metric such that the Gaussian curvature $K_\sigma \leq -1$. Then a holomorphic map $f:(D,\rho) \to (S,\sigma)$ is distance decreasing; i.e. $\sigma(f(x),f(y))\leq \rho(x,y)$. There’s actually an even further generalization due to Yau. Let $(T,\tau)$ be a Riemann surface with $K_\tau \geq -1$ and $K_\sigma \leq -1$ still. We can use the metrics to define arclength of paths (the distance between points is determined by geodesics). Then a holomorphic map $f:(T,\tau) \to (S,\sigma)$ decreases arclength.
So we now know that holomorphic maps are restricted to distance decreasing maps when going from Riemann surfaces that are less negatively curved to those that are more negatively curved. Of course, the obvious inclusions show there are maps going the other way, from negative to positive: $D \hookrightarrow \mathbb{C} \hookrightarrow \widehat{\mathbb{C}}$. But in fact, going the other way, there are no nontrivial maps; so not only are maps distance decreasing, they are constant maps which obviously decrease distance to zero. To show there are no maps $\widehat{\mathbb{C}} \to \mathbb{C}$ or to target $D$, the maximum principal shows the maximum has to be obtained on the boundary and not interior or else the map is constant. But here, the boundary is empty and the Riemann sphere is compact so all continuous maps have realized maxima. Liouville’s theorem shows that bounded entire functions are constant so $\mathbb{C} \to D$ must be constant. Since Riemann surfaces are always quotients of one of the three simply-connected Riemann surfaces, then we can lift any map $f:S \to T$ to the universal covers and apply the arguments we just gave. In other words, all holomorphic maps from positively curved Riemann surfaces to flat or negatively curved ones are constant and similarly from flat to negatively curved surfaces.
Example: The Riemann sphere with 3 points removed can be viewed as the complex line with two points removed. Since this is an example where $2g +n \geq 3$, then a holomorphic map $f:\mathbb{C} \to \mathbb{C} \setminus {a,b}$ is in fact constant because the target admits a metric of negative curvature. This is known as Picard’s little theorem and tells us that holomorphic maps $\mathbb{C} \to \mathbb{C}$ are almost surjective, missing at most one point; e.g. $\exp: \mathbb{C}\to \mathbb{C} \setminus {0}$.
Automorphisms of Simply-Connected Riemann Surfaces
An automorphism of a Riemann surface $S$ is a conformal equivalence $f:S \to S$. On the Riemann sphere, rational maps are polynomials divided by polynomials; these have zeros and poles. The automorphisms are the rational polynomials where the numerator and denominator are both linear polynomials, giving us something of the form $\dfrac{az+b}{cz+d}$ where $ad-bc = 1$. We can identify these with the group $SL(2,\mathbb{C})$ Since multiplying top and bottom by $-1$ wouldn’t do anything, we quotient by $\pm \text{Id}$ and obtain $PSL(2,\mathbb{C})$ as the group of automorphisms of $\widehat{\mathbb{C}}$. These also go by the name of Möbius transformations. The maps, being conformal, preserve angles. Since circles in $\mathbb{C}$ are the only curves with constant curvature, these automorphisms send circles to circles. We think of a straight line as a circle of infinite radius. A nice way to think about Möbius transformations is by placing a unit sphere about the complex plane plus a point at infinity and using stereographic projection. This video explains it.
For $\mathbb{C}$, the automorphisms are of the form $\lambda z + c$ where $\lambda \neq 0$. So these can be identified with the group $\mathbb{C}^* \times \mathbb{C}$. Put another way, these are affine transformations.
Lastly, the automorphisms of the unit disk are of the form $f(z) = e^{i\theta} \dfrac{z-a}{1-\bar{a}z}$ where $a \in D$. So this could be thought of as a solid torus without its boundary. But we can identify the open disk with the upper half plane and more easily see from this that the automorphisms can be identified with the group $PSL(2,\mathbb{R})$. As mentioned above, these automorphisms also preserve the hyperbolic metric; in fact, they are the maps that do. So $PSL(2,\mathbb{R})$ is both the automorphisms in terms of complex geometry and hyperbolic geometry. Also, $PSL(2,\mathbb{R})$ is not a complex Lie group like the other two but is a real Lie group. The map $D \to \mathbb{H}$ sending $z \mapsto i(1-z)/(1+z)$ is holomorphic with inverse $w \mapsto (i-w)/(i+w)$. Note the first maps sends $0 \mapsto i, 1 \mapsto 0, -1 \mapsto \infty$.
To see why the automorphisms take the written form above, let $g$ be an arbitrary automorphism of the open disk and suppose it sends $a \in D$ to 0. Let $f(z) =\dfrac{z-a}{1-\bar{a}z}$; it’s inverse is $\dfrac{1}{1-|a|^2} \cdot \dfrac{z+a}{1+\bar{a}z}$. We see $|f(z)| < 1$ if and only if $(z-a)(\bar{z}-\bar{a}) < (1-\bar{a}z)(1-a\bar{z})$. Doing some algebra, this is equivalent to $(1-|a|^2)(1-|z|^2) > 0$; since both $|a|,|z| <1$, then $|f(z)| < 1$. Next, set $h = g \circ f^{-1}$; this sends 0 to 0. By the Schwarz Lemma, $|h(z)| \leq |z|$. But also, $h$ is an automorphism and its inverse fixes the origin too. Schwarz Lemma applied to $h^{-1}$ shows $|h^{-1}(w)| \leq |w|$. Setting $w = h(z)$, we have $|z| \leq |h(z)|$ which means $h$ is a rotation and hence, $g(z) = e^{i\theta}f(z)$.
A point to notice is that for any maps $f,g:X \to X$, if $f \circ g = g \circ f$, then if $x$ is a fixed point of $g$, then $f(x) = f(g(x)) = g(f(x))$. In other words, when $f,g$ commute and $x$ is a fixed point of $g$, then $f(x)$ is also a fixed point of $g$. Let us go back and describe some of the automorphisms of the simply-connected Riemann surfaces in more detail using the idea of fixed points.
The automorphisms of $\widehat{\mathbb{C}}$ are also called Möbius transformations or fractional linear transformations and they are simply 3-transitive which just means that for any three distinct points, you can prescribe three distinct points for where they are mapped to and there is exactly one Möbius transformation with that property. In particular, the only one that fixes three distinct points is the identity. Also, recall that a map $\alpha:X \to X$ is but an involution if it is a nonidentity map but $\alpha \circ \alpha$ is the identity.
Lemma: The fixed points of automorphisms of $\widehat{\mathbb{C}}$ have either one or two fixed points. Two nonidentity automorphisms commute if and only if they have the same fixed point set. The only exception to this are provided by pairs of commuting involutions, each of which interchages the two fixed points of the other.
Proof: To find the fixed points of a fractional linear, we end up solving a quadratic equation. Since $\mathbb{C}$ is algebraically closed, then there is either one fixed point (counted with multiplicity 2) or two distinct fixed points.
Now suppose that $g$ has two fixed points and commutes with $f$. Above, we observed that if $g(x)=x$, then $g(f(x)) = f(x)$. Thus, $f^{\circ n}(x)$ are all fixed points of $g$. This means that either $f(x)=x$ or $f^{\circ 2}(x)=x$. That is, either $f$ has the same fixed points as $g$ or $f$ interchanges them. In the first case, we can do a change of coordinates to make it so that the two fixed points are 0 and $\infty$ and we see that the $f$ and $g$ must both be of the form $z \mapsto \lambda z$ and these maps certainly commute. In the latter case, if $f$ interchanges 0 and $\infty$, it must be of the form $z \mapsto \eta/z$ which is an involution. On the other hand, $g(z) = \lambda z$ and since it commutes with $f$, this implies $\lambda^2 = 1$ which means $g$ is also an involution. If $g$ has exactly one fixed point, we can take it to be the point at $\infty$ and $f$ must also fix this point. This means that $f,g$ are both translations which certainly commute. $\square$
Moving on, let’s suppose that $f,g$ are automorphisms of $\mathbb{C}$. A map of the form $\lambda z +c$ has at most one fixed point $z_0$. If it has one, the map can be rewritten as $\lambda(z-z_0) + z_0$. It is also possible for an automorphism to have no fixed point, in which case, it is simply the translation $z+c$. So now, if $f,g$ commute and $g$ has a fixed point $z_0$, then $f(z_0)$ is also a fixed point which means $\lambda(f(z_0)-z_0) + z_0 = f(z_0)$ which implies $(\lambda -1)(f(z_0)-z_0) = 0$. If the second term is nonzero, this makes $\lambda = 1$ which means $g$ is in fact, the identity map. Otherwise, $f(z_0)=z_0$; i.e. $z_0$ is also a fixed point for $f$. To summarize:
Lemma: If $f,g:\mathbb{C} \to \mathbb{C}$ are two commuting automorphism and neither is the identity map, then either they are both translations or they each have the same unique fixed point.
For the open disk, in order to give better descriptions of the automorphisms of $D$, we need to enlarge the space to the closed unit disk; the action of $PSL(2,\mathbb{R})$ extends to these maps. These have the nice property that they map hyperbolic lines (image of geodesics) to hyperbolic lines. The hyperbolic lines in the disk model look like arcs of circles which intersect the boundary at right angles. We’ll call them h-lines for short. This includes a straight line which can considered a circle with infinite radius. As it turns out, there are three classes of disk automorphisms other than the identity map:
- Those with exactly one fixed point on the interior (elliptic)
- Those with exactly one fixed point on the boundary (parabolic)
- Those with exactly two fixed points on the boundary (hyperbolic)
Note: Unfortunately, the term hyperbolic here does not reference hyperbolic metrics; there are multiply uses for this word in mathematics.
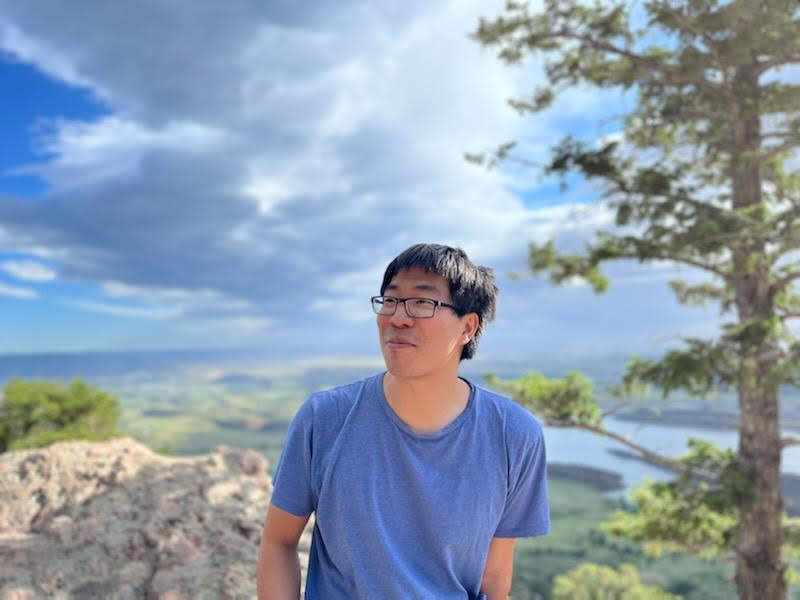
Say we have an elliptic map which fixes interior point $a$. We can use the automorphism $(z-a)(1-\bar{a}z)$ and conjugate the elliptic map by it to get a map that fixes the origin. The Schwarz Lemma once again tells us that this is a rotation. So elliptic maps are like rotations around some fixed point $a$. Interestingly, if we depict this in the Poincaré disk, circles are rotated around the center point $a$ and they will look like Euclidean circles. However, it will not look like $a$ is at their center in the Euclidean sense. The only center point where Euclidean and hyperbolic circles coincide is for $a=0$. Note that in the picture, a line $L_1$ is mapped to another geodesic $L_2$.
 From _Visual Complex Analysis_ by Tristan Needham
From _Visual Complex Analysis_ by Tristan Needham
For parabolic maps, we identify $\overline{D}$ with the closed upper half plane and treat the single fixed boundary point as the point at $\infty$. The only elements of $PSL(2,\mathbb{R})$ which do not have interior fixed points are of the form $aw+b$ with $a>0$; without interior fixed points, then in fact $a=1$. So parabolic maps on the disk correspond simply to horizontal translation of the upper half plane. If the map fixes two boundary points, we can take those points to be 0 and $\infty$ in $\partial \mathbb{H}$ and the map is simply of the form $w \mapsto aw$.
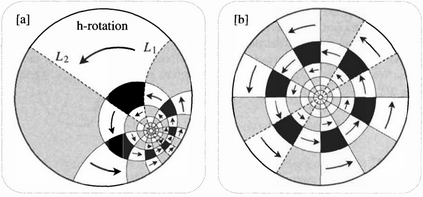
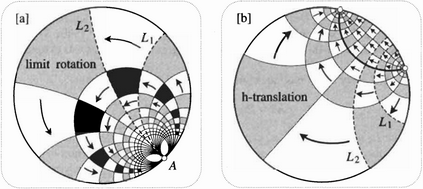 Parabolic and Hyperbolic Automorphisms of the Disk
Parabolic and Hyperbolic Automorphisms of the Disk
In the left picture above, we have a parabolic map where an h-line $L_1$ is mapped to another h-line $L_2$. Horocycles are circles tangent to $A$ and they are each invariant under the parabolic map. They are also orthogonal to the h-lines that eminate from $A$. In the right picture, we have a hyperbolic map that fixes two boundary points. There is a single bolded hyperbolic line between them that is invariant and we see once again that lines are mapped to lines ($L_1 \to L_2$). We also see certain arcs of circles which are invariant; those arcs are not h-lines.
Interestingly, the area of hyperbolic triangles are determined by their angles. Thus, there is no way to enlarge a triangle’s area while preserving its angles; i.e. there are no similarity transformations which are not isometries. This is very different from Euclidean geometry where we can easy enlarge a triangle and still maintain its angles.
The parabolic maps are useful as we can use them to build Riemann surfaces with punctures. Above, I mentioned Fuchsian groups; we just need a Fuchsian group $\Gamma$ with some parabolic maps and $D/\Gamma$ will be a Riemann surface with punctures which are also called cusps. We should not simply delete a point from an already made Riemann surface as that would lead to a space with incomplete metric since we can reach the deletion in finite time. But if we use the parabolic map, then the ideal point is “infinitely” far away. In a way, all of these cusps are locally the same.
Lemma: Two nonidentity automorphisms of $D$ commute if and only if they have the same fixed point set in $\overline{D}$.
Proof: Let $\alpha(z) = 1/\bar{z}$; this is an anti-holomorphic involution. Note that it maps the open unit disk to the complement of the open unit disk and sends the unit circle to itself. Let $F$ be the extension of a Möbius transformation that was on the open disk, extending to the Riemann sphere. Since $F$ is represented by a real $2\times 2$ matrix, the real values do not mind that $\alpha$ is anti-holomorphic and therefore, $\alpha \circ F \circ \alpha$ is holomorphic and equal to $F$ on the unit circle. But two holomorphic functions of one variable that agree on a sequence with an accumulation point must equal. Thus, $\alpha \circ F \circ \alpha = F$ and when applying $\alpha$ again on the left, since it’s an involution, we have $F \circ \alpha = \alpha \circ F$. Thus, $F$ has a fixed point $z_0$ in the open disk if and only if $\alpha(z_0)$ is also a fixed point which necessarily is in the complement of the closed disk.
If we can exclude the possibility of involutions, then our lemma above for commuting automorphisms on the Riemann sphere tells us that the commuting automorphisms must have the same fixed points. So what happens if $F$ were an involution on $\widehat{\mathbb{C}}$? Differentiating $F\circ F = \text{Id}$ shows that $F’(F(z))F’(z)=1$; if we plug in a fixed point $z_0$ of $F$, we find $F’(z_0) = \pm 1$. It must be equal to $-1$ or else it won’t be an involution. But also, if $F$ maps $D$ to itself, the fixed points cannot be on the unit circle. One must be in $D$ and the other in the complement of the closed disk. A second involution which commutes with $F$ and interchanges these two fixed points would not be mapping $D$ to itself. So we have ruled out the possibility of commuting involutions. $\square$
Aside: The space of Gaussian distributions $N(\mu,\sigma)$ can be identified with $\mathbb{R} \times \mathbb{R}_{>0} = \mathbb{H}$, the upper half plane. There is a metric called the Fisher information metric where a large distance between two distributions means it’s easy to tell them apart when sampling random points but a small distance means it’s difficult. For example, if both distributions had small variance and a large difference in means, then it’s easy to tell them apart. It turns out that with the Fisher metric, this Riemannian manifold of univariate Gaussian distributions is isometric to the hyperbolic Poincaré upper half plane. Thus, it has the same geodesics! See here for calculations.